_广告_CC-Cheats For Dma
CC Cheats -CS2
CC Cheats -Loader
本文档使用 MrDoc 发布
-
+
首页
CC Cheats -CS2
# CS2 DMA 外置辅助工具 — 产品文档 > 基于 DMA(Direct Memory Access)硬件的 Counter-Strike 2 外置辅助工具,采用 C++ 编写,ImGui + DirectX 11 渲染覆盖层,MemProcFS 内核级内存读取,支持 KmBox 硬件输入设备。 --- ## 菜单与界面  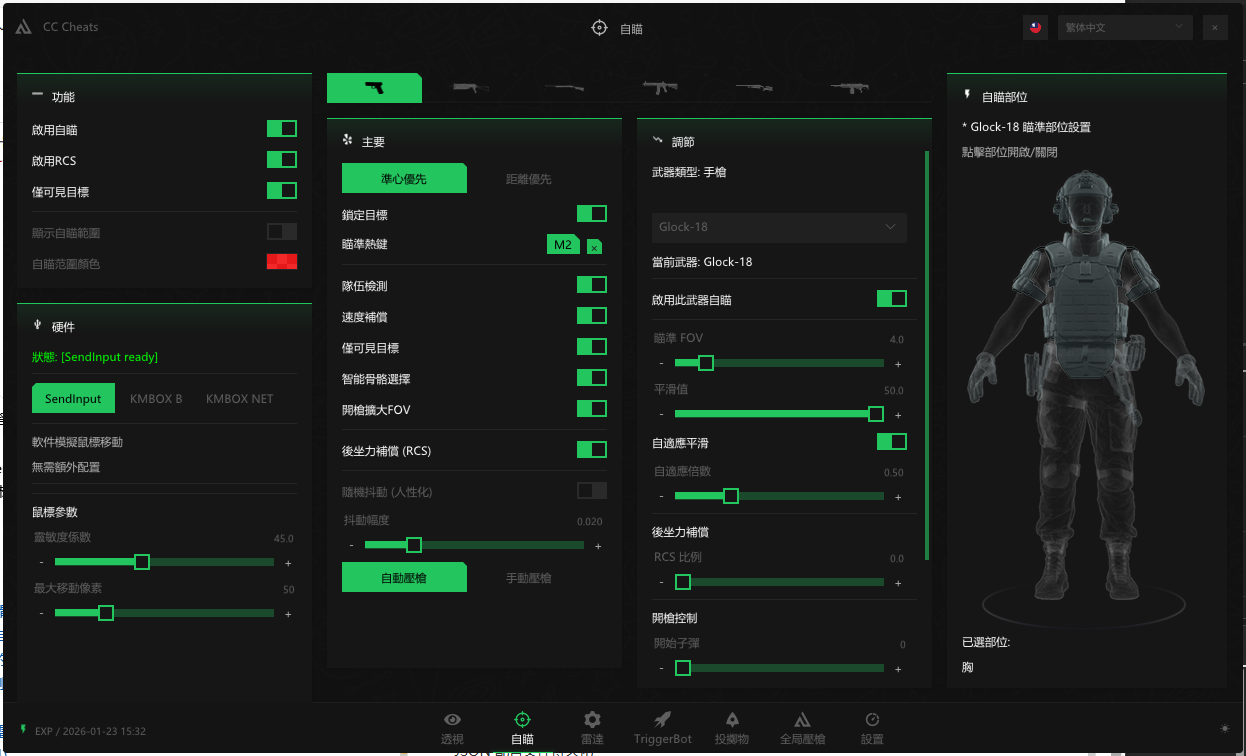 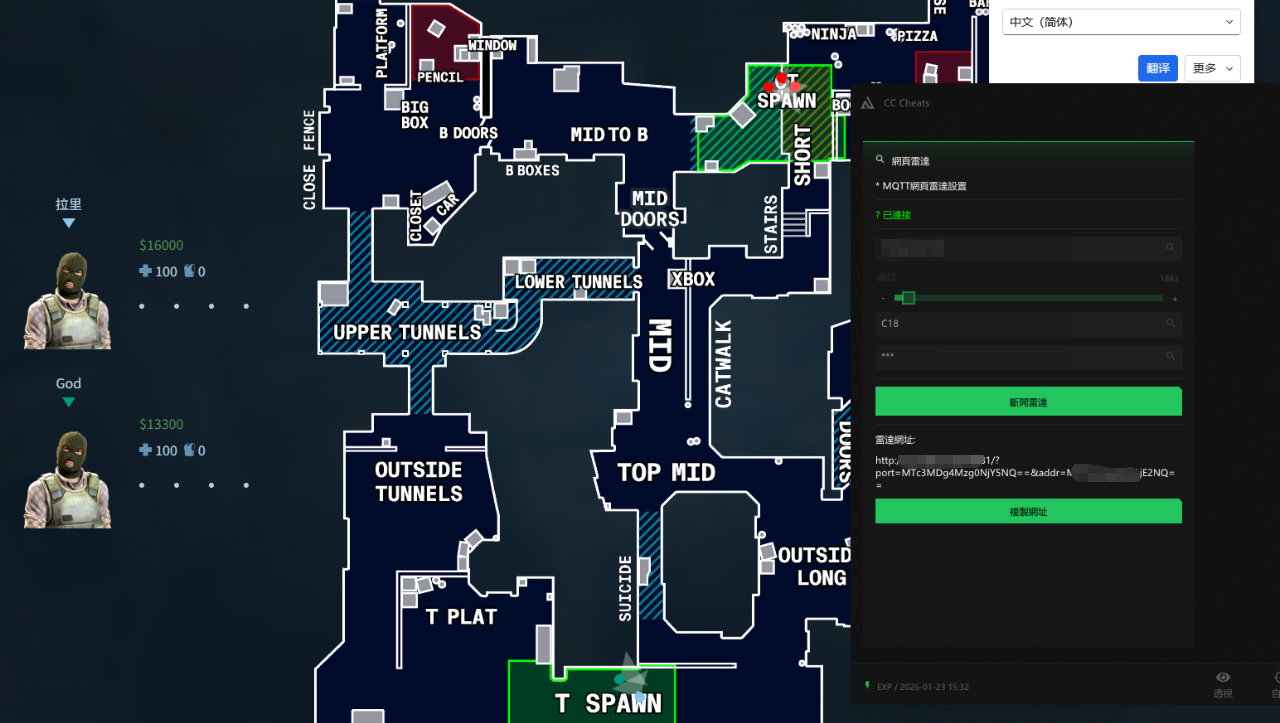 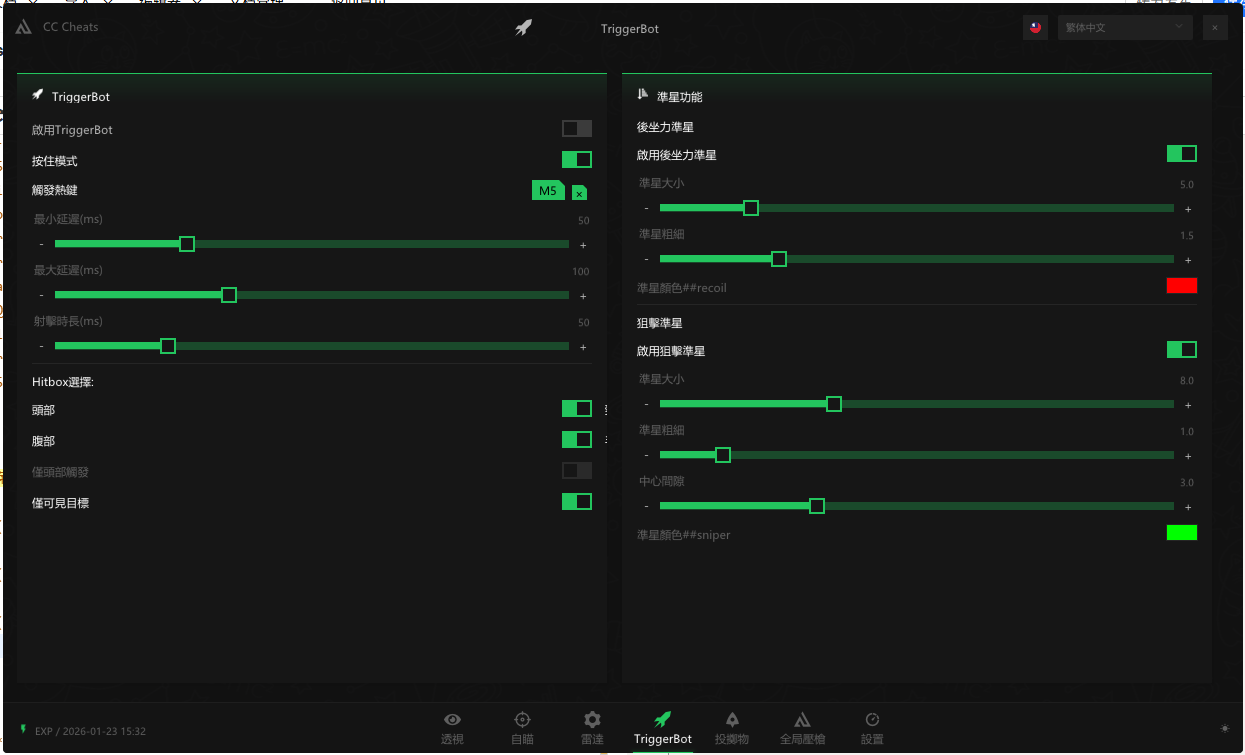 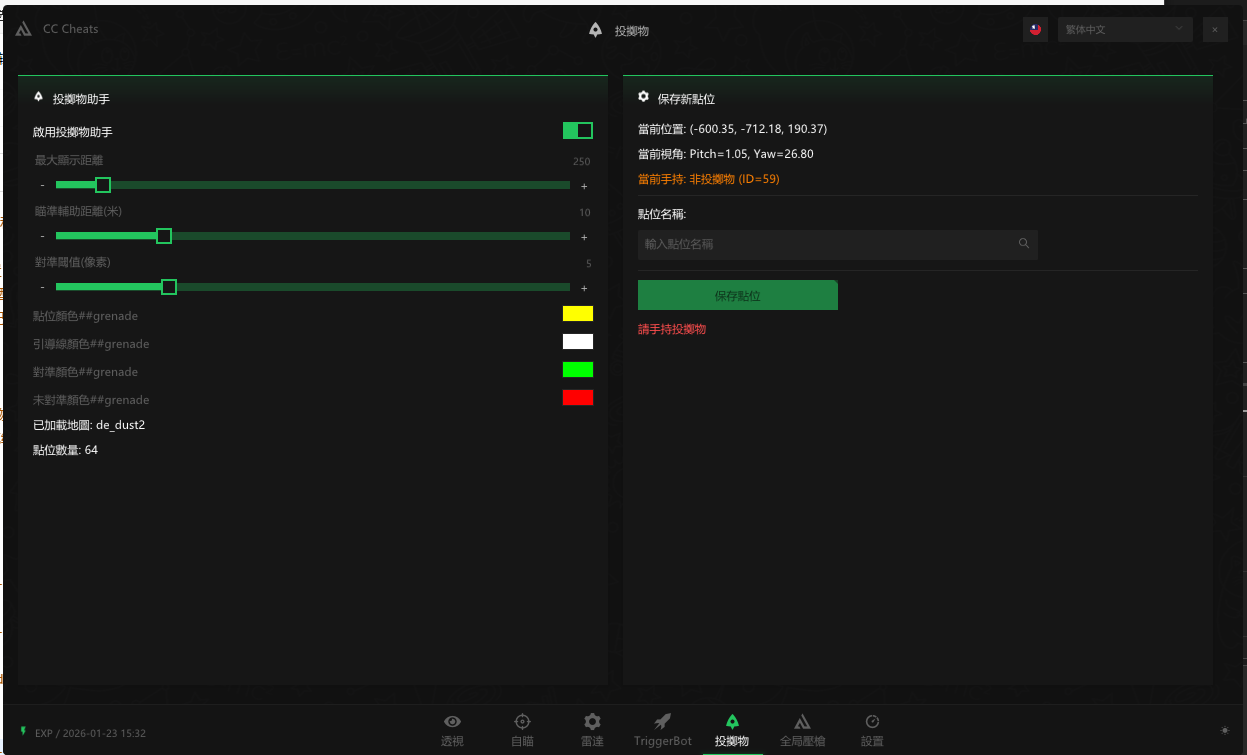 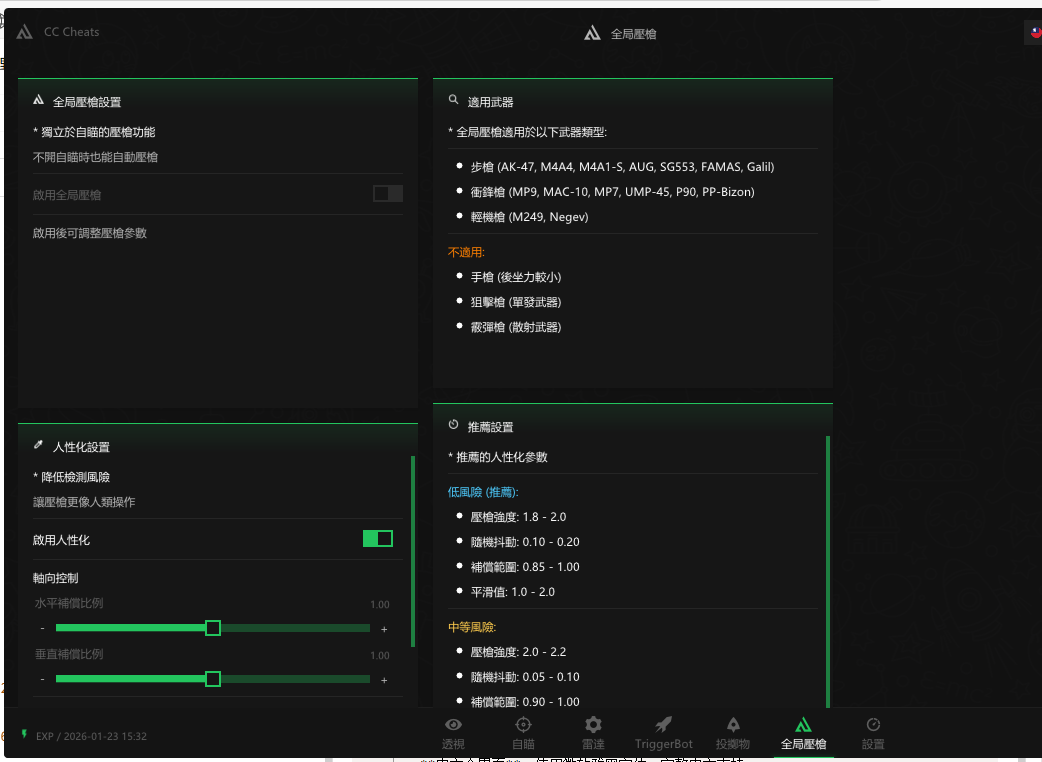 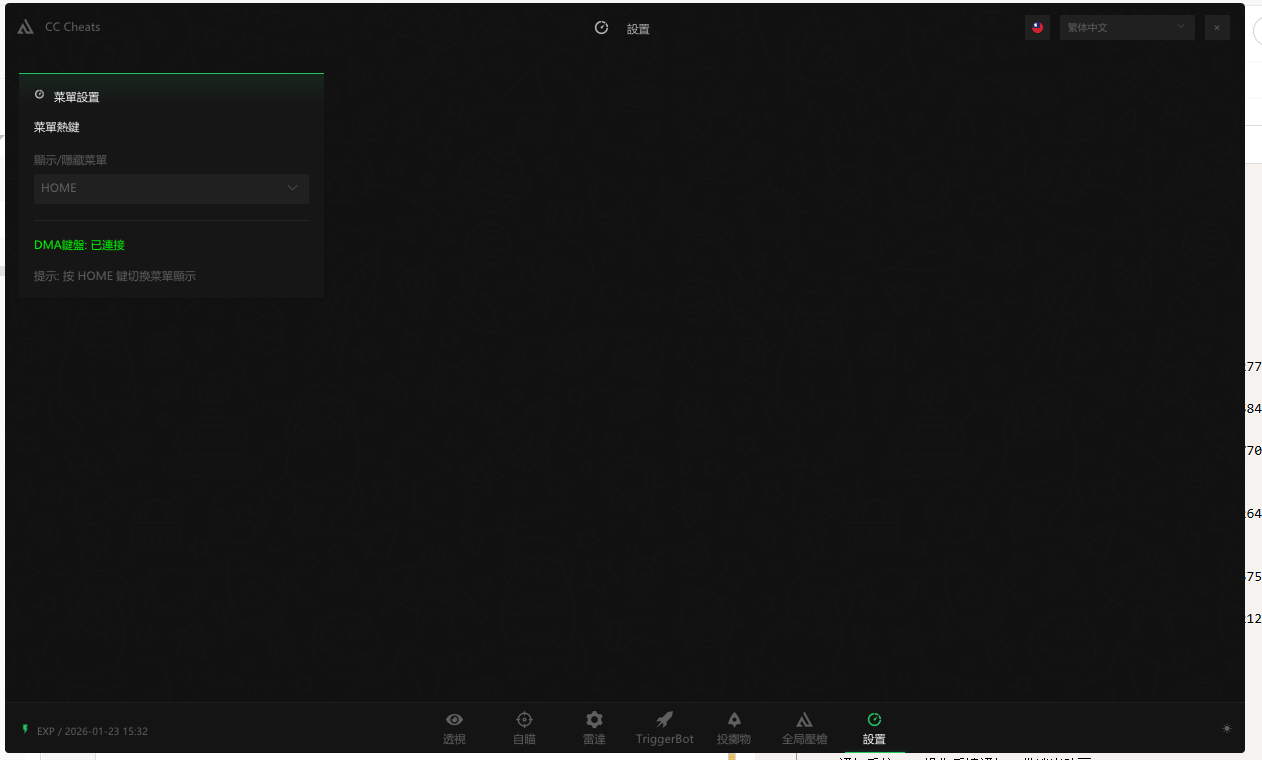 ### 菜单系统 - **HOME 键**:切换菜单显示/隐藏(支持 DMA 键盘检测) - **END 键**:安全退出运行(支持 DMA 键盘检测) - **标签页导航**:自瞄、透视、杂项等分类标签 - **深色/浅色主题**:可切换的 UI 主题 - **中文全界面**:使用微软雅黑字体,完整中文支持 - **通知系统**:操作反馈通知,带淡出动画 ## 目录 - [项目概述](#项目概述) - [系统架构](#系统架构) - [核心功能详解](#核心功能详解) - [ESP 透视系统](#esp-透视系统) - [Aimbot 自瞄系统](#aimbot-自瞄系统) - [TriggerBot 自动扳机](#triggerbot-自动扳机) - [AutoWall 穿墙伤害计算](#autowall-穿墙伤害计算) - [VisCheck 可见性检测](#vischeck-可见性检测) - [投掷物助手](#投掷物助手) - [雷达系统](#雷达系统) - [准星功能](#准星功能) - [硬件支持](#硬件支持) - [DMA 内存读取](#dma-内存读取) - [KmBox 输入设备](#kmbox-输入设备) - [配置系统](#配置系统) - [菜单与界面](#菜单与界面) - [环境要求与部署](#环境要求与部署) - [使用指南](#使用指南) - [项目结构](#项目结构) - [技术特色](#技术特色) - [常见问题](#常见问题) --- ## 项目概述 本项目是一款面向 CS2(Counter-Strike 2)的专业级 DMA 外置辅助工具。项目从易语言原始代码迁移至 C++ 实现,在保留原有功能完整性的同时,大幅提升了性能和可维护性。 项目采用硬件级 DMA(Direct Memory Access)技术进行内存读取,完全不接触游戏进程,配合 KmBox 硬件输入设备实现鼠标控制,从根本上规避了传统软件层面的检测手段。 ### 主要特性一览 - 完整的 ESP 透视系统(方框、骨骼、血条、武器、距离、位置等) - 每把武器独立配置的 Aimbot 自瞄系统 - 基于 Hitbox 胶囊体碰撞检测的 TriggerBot - BVH 加速的地图碰撞可见性检测(VisCheck) - AutoWall 穿墙伤害计算 - MQTT 网络雷达 + 本地小地图雷达 - 投掷物助手(支持所有竞技地图) - 后坐力准星 / 狙击准星 - JSON 配置文件持久化 - 中文全界面支持  ## 核心功能详解 ### ESP 透视系统 ESP(Extra Sensory Perception)是本工具最核心的功能模块,提供全方位的游戏信息可视化。 #### 敌人 ESP 功能 | 功能项 | 说明 | 可配置项 | |--------|------|---------| | 方框 (Box) | 2D 包围盒,支持多种样式 | 颜色、粗细、可见/不可见颜色区分 | | 骨骼 (Skeleton) | 18 骨骼点连线绘制 | 颜色、粗细、可见性颜色区分 | | 血条 (Health Bar) | 动态血量条 | 位置(上下左右可拖拽)、颜色 | | 护甲条 (Armor Bar) | 护甲值显示 | 位置、颜色 | | 弹药条 (Ammo Bar) | 当前弹匣弹药 | 位置、颜色 | | 名称 (Name) | 玩家名称 | 位置、颜色 | | 武器文字 | 当前持有武器名称 | 位置、颜色 | | 武器图标 | Panorama 风格武器图标字体 | 位置、颜色、大小 | | 距离 (Distance) | 3D 距离(英尺) | 位置、颜色 | | 视角线 (View Line) | 玩家朝向射线 | 长度、颜色、粗细 | | 经济 (Money) | 玩家金钱 | 颜色 | | 位置 (Location) | 地图位置名称 | 颜色 | | 装备栏 (Equipment) | 投掷物缩写显示 | 颜色 | | 颜色标识 (Color Mark) | 队伍颜色三角标记 | 开关 | | Hitbox 胶囊体 | 14 个胶囊体碰撞盒可视化 | 颜色、线框模式 | #### 队友 ESP 功能 队友 ESP 拥有与敌人 ESP 完全相同的功能项,但默认关闭,可独立配置颜色和开关。 #### ESP 预览系统 内置可视化 ESP 预览编辑器,支持: - 拖拽调整各信息元素的显示位置(上/下/左/右) - 实时预览方框样式和信息布局 - 多种方框类型切换 - 血条/护甲条/弹药条位置自由调整 #### 其他 ESP 功能 - **C4 炸弹显示**:下包位置、倒计时、屏幕坐标 - **地面物品显示**:掉落武器和装备 - **屏幕外指示器**:屏幕外敌人方向指示箭头 - **FOV 圆圈**:自瞄范围可视化 - **最大透视距离**:可配置最远显示距离(默认 5000 游戏单位) --- ### Aimbot 自瞄系统 自瞄系统采用 KateBot 风格的每把武器独立配置方案,支持全部 CS2 武器的精细化调参。 #### 每武器独立配置 系统为每把武器维护独立的配置参数: | 参数 | 说明 | 典型值 | |------|------|--------| | FOV | 瞄准视场角 | AK47: 2.5°, AWP: 2.5°, Glock: 4° | | Smooth | 平滑值(越大越慢) | AK47: 12, AWP: 10, Deagle: 32 | | RCS Scale | 后坐力补偿强度 | AK47: 2.2, AWP: 0, Glock: 0 | | Start Bullet | 开始瞄准的子弹序号 | 0(始终) | | End Bullet | 停止瞄准的子弹序号 | 30 | | Kill Delay | 击杀后延迟(ms) | AK47: 500, AWP: 800 | | Bone Selection | 骨骼选择(人体模型) | 头/颈/胸/腹/盆骨/四肢 | #### 支持的武器列表 按类型分组,共覆盖 CS2 全部主要武器: - **手枪 (10)**:Glock-18, P2000, USP-S, P250, Five-SeveN, Tec-9, CZ75-Auto, Dual Berettas, Desert Eagle, R8 Revolver - **冲锋枪 (7)**:MAC-10, MP9, MP7, MP5-SD, UMP-45, P90, PP-Bizon - **霰弹枪 (4)**:Nova, XM1014, MAG-7, Sawed-Off - **步枪 (7)**:FAMAS, Galil AR, M4A4, M4A1-S, AK-47, AUG, SG 553 - **狙击枪 (4)**:SSG 08, AWP, SCAR-20, G3SG1 - **轻机枪 (2)**:M249, Negev #### 全局功能 | 功能 | 说明 | |------|------| | 目标选择模式 | 准心优先(FOV 最小)/ 距离优先(3D 距离最近) | | 目标锁定 | 锁定当前目标直到死亡或超出范围 | | 仅可见目标 | 结合 VisCheck 只瞄准可见敌人 | | 队伍检测 | 自动排除队友 | | 智能骨骼选择 | 根据可见性自动选择最佳骨骼 | | 速度补偿 | 预判移动目标位置 | | 随机抖动 | 人性化微调,模拟人类瞄准 | | 自适应平滑 | 根据角度差动态调整平滑值 | | 开枪扩大 FOV | 射击中自动扩大搜索范围 | #### 全局压枪(独立于自瞄) 全局压枪系统可在没有自瞄目标时独立工作: - 可配置压枪强度(RCS Scale) - 从第 N 发子弹开始压枪 - 人性化设置:随机抖动、补偿比例随机化 - X/Y 轴独立补偿比例 - 平滑过渡 #### 鼠标移动方式 通过统一的 `MouseController` 支持三种鼠标移动方式: | 方式 | 说明 | 适用场景 | |------|------|---------| | SendInput | Windows API 直接发送输入 | 开发测试 | | KmBox B-Pro | 串口通信硬件设备 | 正式使用 | | KmBox Net | 网络通信硬件设备 | 正式使用 | --- ### TriggerBot 自动扳机 TriggerBot 基于 Hitbox 胶囊体碰撞检测,当准心对准敌人身体部位时自动开火。 #### 功能特性 - **按键触发**:支持按住模式和切换模式 - **随机延迟**:可配置最小/最大延迟(ms),模拟人类反应时间 - **射击持续时间**:控制每次点击的持续时间 - **Hitbox 选择**:可独立开关头部、颈部、胸部、腹部、手臂、腿部 - **距离限制**:最大触发距离 - **开镜检测**:狙击枪可要求开镜才触发 - **闪光检测**:被闪光时暂停触发 #### Hitbox 胶囊体定义 系统使用 14 个胶囊体覆盖人体:  --- ### AutoWall 穿墙伤害计算(该功能需要trim文件支持) AutoWall 模块计算子弹穿透墙壁后的伤害值,用于 ESP 显示和智能目标选择。 #### 计算要素 - **材质属性**:每种材质有独立的穿透距离修正和伤害修正系数 - **武器数据**:基础伤害、距离衰减、穿透力、护甲穿透率、射程、爆头倍率 - **计算结果**:最终伤害值、是否可穿透、穿墙数量、总穿透厚度 #### ESP 集成 在 ESP 中显示 `H: xx B: xx` 格式的伤害提示: - `H:` 爆头伤害 - `B:` 身体伤害 未遮挡时手持AK-47:头部142伤害 身体35伤害  遮挡时手持AK-47:头部75伤害 身体4伤害 **不同材质不同伤害计算,硬墙体无伤害** 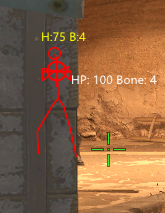 --- ### VisCheck 可见性检测 基于 BVH(Bounding Volume Hierarchy)加速结构的射线-三角形碰撞检测系统,用于判断玩家之间是否存在视线遮挡。不同材质不同渲染 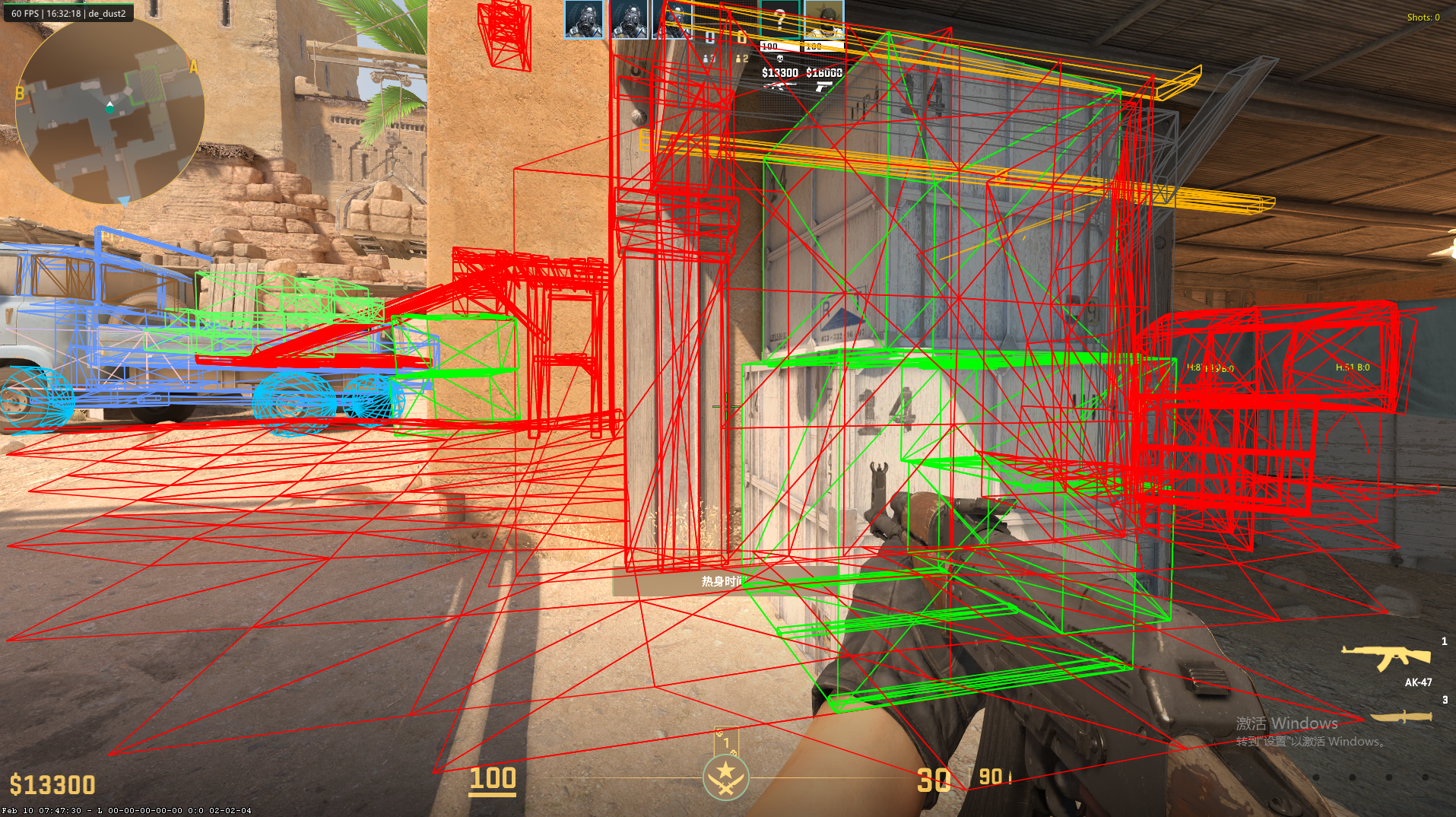 #### 技术实现 1. **地图碰撞数据**:预处理的 `.tri` / `.trim` 文件,包含地图所有碰撞三角形 2. **KD-Tree 空间索引**:使用 KD-Tree 加速射线查询,避免遍历所有三角形 3. **BVH 加速**:AABB 包围盒层级结构,快速剔除不相交区域 4. **Möller-Trumbore 算法**:高效的射线-三角形相交检测 5. **材质支持**:三角形携带材质索引,可区分不同表面类型 #### 支持的地图 预置碰撞数据文件(`parser/` 目录): | 地图 | 文件 | |------|------| | de_ancient | de_ancient.tri | | de_anubis | de_anubis.tri | | de_dust2 | de_dust2.tri | | de_inferno | de_inferno.tri | | de_mirage | de_mirage.tri | | de_nuke | de_nuke.tri | | de_overpass | de_overpass.tri | | de_vertigo | de_vertigo.tri | | de_mills | de_mills.tri | | de_train | de_train.tri | #### 动态地图加载 系统支持进入地图后自动检测并加载对应的碰撞数据文件,无需手动切换。 --- ### 投掷物助手 投掷物助手(Grenade Helper)提供预设的投掷物点位数据库,辅助玩家精确投掷。    #### 功能特性 - **四种投掷物**:闪光弹、烟雾弹、手雷、燃烧弹 - **三种投掷方式**:站立投、跳投、跑投 - **点位数据**:每个点位包含站位坐标、瞄准角度、投掷物类型、投掷方式 - **距离过滤**:只显示最大距离内的点位 - **瞄准辅助**:显示引导线,对准时变色提示 - **武器匹配**:自动根据当前持有的投掷物类型过滤点位 #### 支持的地图配置 预置 JSON 配置文件(`helper/` 目录): de_ancient, de_anubis, de_dust2, de_inferno, de_mirage, de_nuke, de_overpass, de_vertigo --- ### 雷达系统 本工具提供两套雷达方案: #### 1. 本地小地图雷达 在覆盖层上绘制的小地图雷达: - 显示敌人位置、血量、名称、武器 - 自动适配游戏内雷达设置(`cl_hud_radar_scale`, `cl_radar_scale`) - 支持多种分辨率自动定位 - 可配置大小、位置、缩放比例 #### 2. MQTT 网络雷达 通过 MQTT 协议将雷达数据发送到远程服务器,支持在手机/平板等设备上查看: - **MQTT 协议**:使用 Paho MQTT C 库,支持 MQTT v5 - **异步连接**:不阻塞 UI 线程 - **Web 界面**:生成雷达网页 URL,浏览器直接访问 - **数据格式**:JSON 格式,包含所有玩家位置、血量、武器、队伍等信息 - **可配置**:服务器地址、端口、用户名、密码、刷新间隔 --- ### 准星功能 #### 后坐力准星 显示补偿后坐力后的实际弹着点位置: - 可配置大小、粗细、颜色 - 仅在开枪时显示  #### 狙击准星 狙击枪不开镜时显示辅助准星: - 可配置大小、粗细、中心间隙、颜色 - 自动检测武器类型和开镜状态 --- --- ### KmBox 输入设备 KmBox 是专用的硬件键鼠模拟设备,通过物理层面模拟键鼠输入,无法被软件检测。 #### KmBox B-Pro(串口版) - 通过 COM 串口连接 - 可配置 COM 端口号和波特率(默认 115200) - 支持鼠标移动、按键控制 #### KmBox Net(网络版) - 通过 TCP/IP 网络连接 - 可配置 IP 地址、端口、MAC 地址 - 支持完整的鼠标控制:移动、左/中/右键、滚轮 - 支持键盘全参数控制 - 贝塞尔曲线鼠标移动(模拟人类轨迹) - 物理键鼠监控和屏蔽功能 - 硬件修正功能 ## 配置系统 `ConfigManager` 提供完整的 JSON 配置文件管理: #### 功能 - **保存/加载**:将所有模块配置序列化为 JSON 文件 - **多配置文件**:支持创建、切换、删除多个配置方案 - **配置目录**:`configs/` 文件夹下存储所有配置文件 - **默认配置**:首次运行自动创建默认配置 #### 序列化模块 | 模块 | 说明 | |------|------| | ESP | 透视系统所有开关和颜色 | | Aimbot | 自瞄全局设置 + 每武器配置 | | Mouse | 鼠标控制器配置 | | TriggerBot | 自动扳机配置 | | Crosshair | 准星功能配置 | | Radar | 本地雷达配置 | | MQTT | 网络雷达配置 | | Global | 全局设置 | | GrenadeHelper | 投掷物助手配置 | | ESPPreview | ESP 预览编辑器布局 | --- ### 游戏信息显示 覆盖层上显示实时游戏信息: - FPS 帧率 - 当前时间 - 地图名称 - 可配置位置(左上/居中/右上) --- ## 环境要求与部署 ### 硬件要求 | 组件 | 要求 | |------|------| | DMA 板卡 | 支持 MemProcFS 的 FPGA DMA 设备(如 Screamer, LeetDMA 等) | | KmBox(可选) | KmBox B-Pro 或 KmBox Net | | 操作系统 | Windows 10/11 (x64) | | 显卡 | 支持 DirectX 11 | ### 运行时文件 程序运行目录下需要以下文件: ``` CS2.exe # 主程序 ├── vmm.dll # MemProcFS 核心库 ├── leechcore.dll # LeechCore 库 ├── FTD3XX.dll # FTDI USB3 驱动 ├── FTD3XXWU.dll # FTDI WinUSB 驱动 ├── dbghelp.dll # 调试辅助库 ├── makcu-cpp.dll # 附加库 ├── card.txt # 卡密文件 ├── configs/ # 配置文件目录 ├── parser/ # 地图碰撞数据 │ ├── de_dust2.tri │ ├── de_mirage.tri │ └── ... └── helper/ # 投掷物点位数据 ├── de_dust2.json ├── de_mirage.json └── ... ``` --- ## 使用指南 ### 快速开始 1. **连接 DMA 设备**:确保 DMA 板卡已正确连接并安装驱动 2. **准备运行环境**:将所有运行时文件放置在同一目录 3. **填写卡密**:在 `card.txt` 中写入有效卡密,或启动时通过命令行参数传入 4. **启动 CS2**:在目标机器上启动 Counter-Strike 2 5. **运行程序**:双击 `CS2.exe` 或通过命令行启动 ```cmd # 直接启动(从 card.txt 读取卡密) CS2.exe # 通过命令行传入卡密 CS2.exe YOUR_CARD_KEY ``` 6. **等待连接**:程序会自动等待 CS2 进程,连接成功后初始化所有模块 7. **进入游戏**:进入对局后,TraversePointer 线程会自动开始读取游戏数据 8. **打开菜单**:按 `HOME` 键打开/关闭设置菜单 ### 菜单操作 | 按键 | 功能 | |------|------| | HOME | 打开/关闭菜单 | | 鼠标右键(默认) | 自瞄激活键 | | 鼠标侧键1(默认) | TriggerBot 触发键 | ### 配置管理 1. 在菜单中调整各项参数 2. 点击保存按钮将配置写入文件 3. 可创建多个配置方案,按需切换 4. 配置文件存储在 `configs/` 目录下 ### KmBox 配置 #### KmBox B-Pro 1. 将 KmBox B-Pro 通过 USB 连接到运行辅助工具的电脑 2. 在菜单中选择鼠标移动方式为 "KMBox B" 3. 设置正确的 COM 端口号(可在设备管理器中查看) 4. 设置波特率(默认 115200) #### KmBox Net 1. 将 KmBox Net 连接到同一局域网 2. 在菜单中选择鼠标移动方式为 "KMBox Net" 3. 填写 KmBox Net 的 IP 地址、端口和 MAC 地址 4. 点击连接 ### MQTT 雷达配置 1. 在菜单中启用 MQTT 雷达 2. 配置 MQTT 服务器地址和端口 3. 填写用户名和密码 4. 点击连接 5. 连接成功后会生成雷达 URL 6. 在手机/平板浏览器中打开该 URL 即可查看雷达 ### 地图碰撞数据 VisCheck 可见性检测需要地图碰撞数据文件: 1. 将 `.tri` 或 `.trim` 文件放置在 `parser/` 目录下 2. 文件命名格式:`<地图名>.tri`(如 `de_dust2.tri`) 3. 进入地图后系统会自动加载对应文件 4. 加载成功后骨骼可见性检测自动启用 --- ## 技术特色 ### 1. 硬件级隔离 整个工具链运行在独立的电脑上,通过 DMA 硬件读取目标机器内存,通过 KmBox 硬件模拟键鼠输入。目标机器上不运行任何额外代码,不注入任何 DLL,不修改任何内存,从物理层面实现了与游戏进程的完全隔离。 ### 2. 分离式目标选择架构 Aimbot 采用创新的分离式目标选择架构: 这种设计避免了重复遍历玩家列表,将目标选择与 ESP 绘制融合在同一循环中。 ### 4. BVH 加速可见性检测 使用 BVH(Bounding Volume Hierarchy)和 KD-Tree 双重空间索引加速射线查询。对于包含数十万三角形的地图碰撞数据,可在微秒级完成可见性判断。 ### 5. 亚像素级鼠标控制 `MouseController` 实现了亚像素累积器,将浮点数角度差精确转换为整数像素移动,避免了传统取整方式导致的精度损失。 ### 7. 模块化设计 每个功能模块(ESP、Aimbot、TriggerBot 等)都是独立的类,拥有自己的配置结构体和全局实例,通过 `ConfigManager` 统一管理配置的序列化和反序列化。 ### 8. 多分辨率自适应 雷达系统支持自动适配多种屏幕分辨率(720p、1080p、1440p、4K 等),并可读取游戏内雷达设置进行精确定位。 --- ## 常见问题 ### Q: 程序启动后提示 "Failed to initialize DMA" **A:** 检查以下几点: 1. DMA 板卡是否正确连接 2. `vmm.dll` 和 `leechcore.dll` 是否在程序目录下 3. FTDI 驱动是否正确安装(`FTD3XX.dll`) 4. 是否以管理员权限运行 ### Q: 连接成功但无法读取模块地址 **A:** 程序会自动尝试 FixCr3 修复页表基址。如果仍然失败: 1. 确认 CS2 已完全启动(到达主菜单) 2. 尝试重启 DMA 设备 3. 检查 DMA 固件版本是否兼容 ### Q: ESP 显示但位置不正确 **A:** 可能是偏移量过期。本项目使用特征码扫描自动定位地址,但游戏大版本更新后特征码可能失效,需要更新 `interfaces.hpp` 中的特征码定义。 ### Q: VisCheck 可见性检测不工作 **A:** 确认以下几点: 1. `parser/` 目录下是否有对应地图的 `.tri` 文件 2. 文件命名是否正确(如 `de_dust2.tri`) 3. 进入地图后查看控制台输出是否有加载成功的提示 ### Q: KmBox 连接失败 **A:** - **B-Pro**:检查 COM 端口号是否正确,波特率是否匹配 - **Net**:检查 IP 地址是否正确,KmBox Net 是否在同一局域网,MAC 地址是否匹配 ### Q: 卡密验证失败 **A:** 1. 检查 `card.txt` 中的卡密是否正确 2. 确认网络连接正常 3. 检查卡密是否过期或已被使用 4. 确认硬件指纹未发生变化(更换硬件后需要重新绑定) ### Q: 菜单无法打开 **A:** 按 `HOME` 键切换菜单。如果 DMA 键盘初始化失败,程序会回退到本地键盘检测。确认键盘按键正常工作。 --- --- ## 免责声明 本项目仅用于学习和研究目的。使用本工具可能违反游戏服务条款,使用者需自行承担一切后果。 --- > 文档版本:v1.0 | 最后更新:2026年2月
admin
2026年2月14日 22:15
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
广告位招租,请联系官网客服
广告位招租,请联系官网客服
广告位招租,请联系官网客服
广告位招租,请联系官网客服
Markdown文件
分享
链接
类型
密码
更新密码